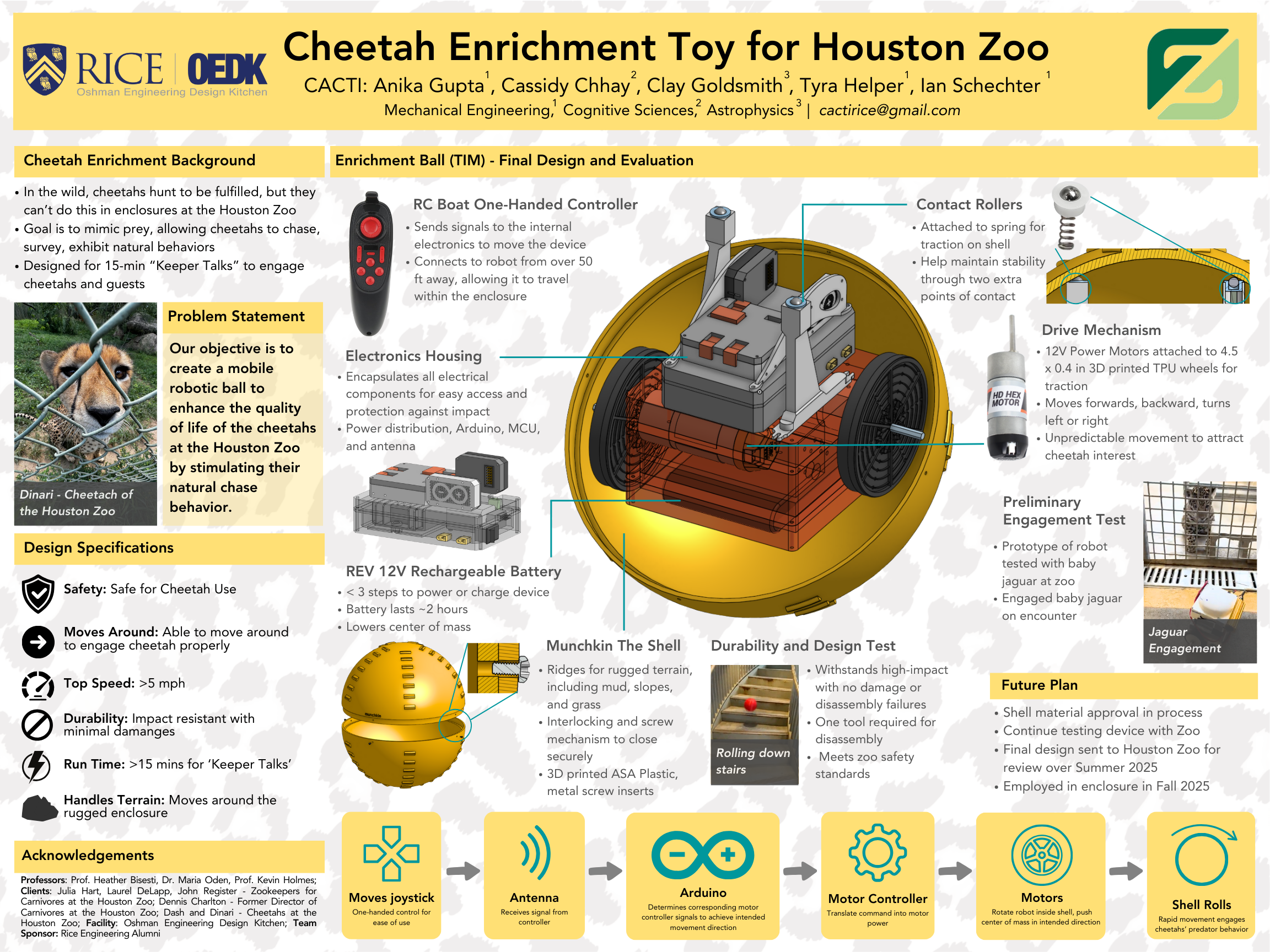
Through interviews with the cheetah keepers and research on cheetah behavior, we established specific design requirements:
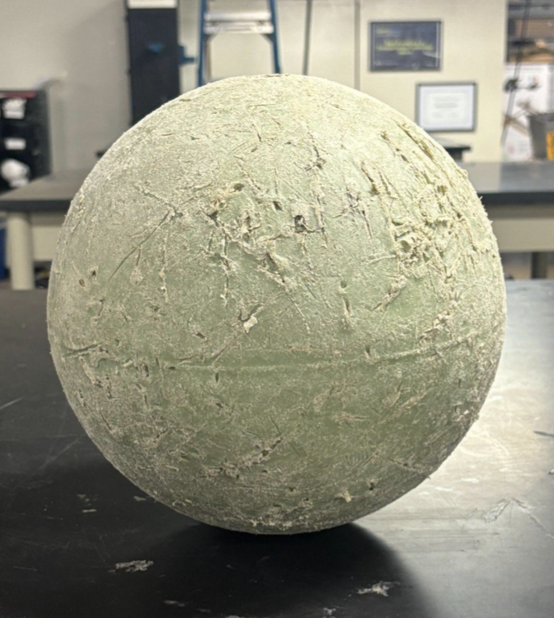
Safety: The ball shell needed to be between 6 inches and 2 feet in diameter to be safe to bat while avoiding choking risk. It should be heavy enough for stability but light enough to move safely. Material had to be hard, non-porous plastic with no rubber, breakable components, holes, or tight spaces that could trap teeth. All internal components must be completely inaccessible to the cheetahs.
Mobility: The device needed remote control with at least 50-foot range, capable of reaching speeds around 5-10 mph with variable speed control. It needed to navigate grassy terrain, climb slopes, and avoid getting stuck in the exhibit's pool. The shell should be weatherproof (sun, rain, wind) and protect the internal robot from slobber, water, and rough play.
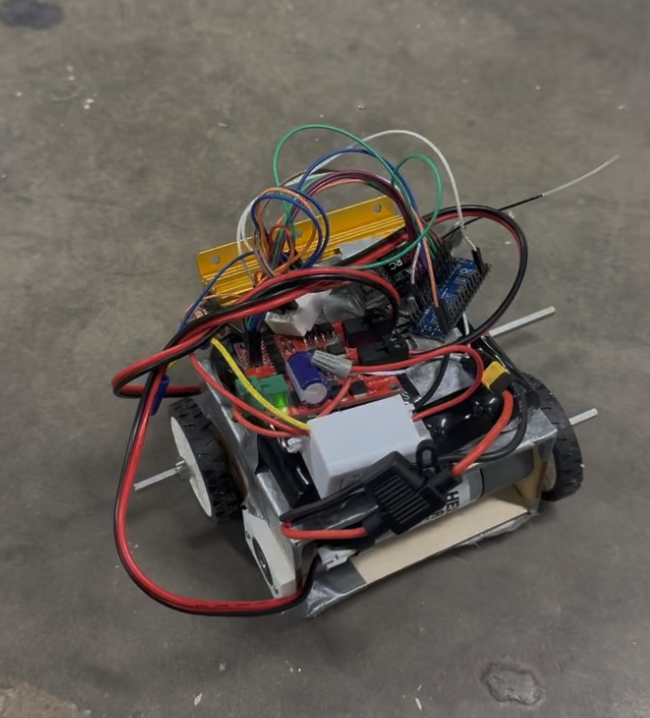
Maintenance: The ball should be openable (screw panel or similar) for maintenance, repairs, and access to electronics. A rechargeable battery with easily accessible charging port was required. Runtime needed to exceed 15 minutes to cover the duration of Keeper Talks.
The cheetah exhibit spans approximately 50 feet from front to back with mesh fencing, containing grass, slopes, rocks, logs, trees, and a pool (drained in winter). A flat area near the front is ideal for keeper demonstrations, while the backyard includes more sloped terrain the ball must traverse.